Mobilitate urbană cooperativă, conectată și automatizată
de Smart City Magazine·
Un plan de mobilitate urbană durabilă abordează mai eficient problemele legate de transport în zonele urbane.
Spațiul urban nu permite extinderea infrastructurii de transport iar, în acest moment, există o presiune foarte mare a cererii de transport în sensul creșterii capacității de transport. Pentru a putea face față acestei provocări este nevoie de o dezvoltare intensivă a sistemelor de transport cu ajutorul sistemelor inteligente pentru transporturi (ITS), pentru a crește capacitatea de transport fără a extinde rețeaua urbană de transport. Soluțiile și tehnologiile actuale din domeniul sistemelor inteligente pentru transporturi au condus la identificarea a trei direcții majore de acțiune în ceea ce privește implementarea soluțiilor ITS.
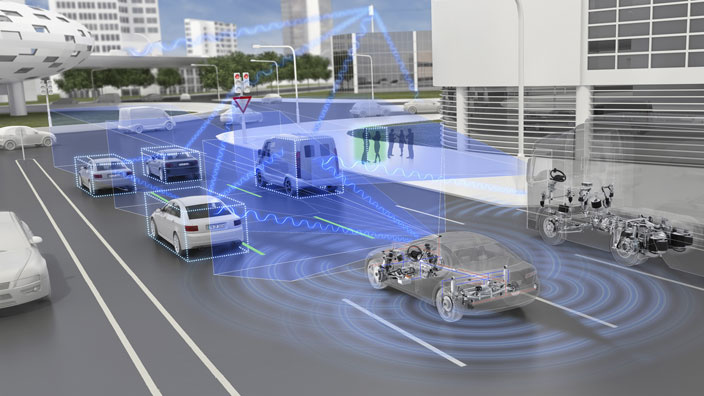
Conceptul de mobilitate urbană este pe cât de modern pe atât de necesar. Prima direcție o reprezintă sistemele cooperative. Acestea sunt sisteme inteligente care permit cooperarea subsistemelor și componentelor pentru a furniza servicii de mobilitate de nivel înalt. Astfel, sistemele instalate la bordul diverselor vehicule pot coopera între ele pentru a furniza servicii de informare a conducătorilor de vehicule. Un vehicul care are o rețea de senzori la bord (care pot culege informații despre condițiile de rulare) poate furniza informații legate de starea drumului către alte vehicule, acestea, la rândul lor vor procesa și retransmite informațiile către alți utilizatori. Sistemul de informare cu privire la condițiile de rulare este de tip cooperativ și are avantajele sistemelor distribuite în ceea ce privește costurile, resursele, reziliența și operarea.
O a doua direcție o reprezintă conectivitatea. Vehiculele și alte dispozitive mobile vor fi conectate între ele pentru a schimba date și informații și pentru a participa, în mod cooperativ, la furnizarea serviciilor ITS (de monitorizare, management, informare, impunere a legilor etc.). Comunicațiile de tip v2v (vehicle - to - vehicle) sau c2c (car - to - car) sunt cele care permit conectarea vehiculelor între ele și oferă posibilitatea dezvoltării unor sisteme mobile distribuite. Comunicațiile de tip v2i (vehicle - to - infrastructure) permit conectarea sistemelor de la bordul vehiculelor cu sistemele instalate în infrastructura rutieră și facilitează integrarea vehiculelor cu infrastructura inteligentă. Comunicațiile mixte de tip x2x (orice - la - orice) descriu cele două tipuri de comunicații și oferă soluții pentru toate aplicațiile ITS care au nevoie de conectivitate.
A treia direcție identificată la acest moment este cea de automatizare. Această automatizare se poate referi la vehicule, acestea trecând prin diverse stadii de conducere automată (de la asistența în conducere la vehicule autonome). Automatizarea se poate referi și la sistemele ITS din infrastructură (se poate vorbi de funcții automate ale sistemelor de management al traficului; un exemplu îl constituie sistemele de detectare automată a incidentelor) unde gradul de automatizare poate cunoaște niveluri relativ înalte cum ar fi cel de autonomie (sistemul gestionează autonom diferite procese, fără intervenția omului).
Aceste trei direcții permit o redefinire pentru planul de mobilitate urbană prin prisma noilor sisteme autonome și conectate care duc la dezvoltarea unor servicii noi de mobilitate. Aceste servicii de mobilitate trebuie privite în contextul conceptului de Smart City și sistemele ITS implementate trebuie corelate cu celelalte sisteme suport pentru orașele inteligente (IT&C). Importanța mobilității cooperative, conectate și automatizate (cu tendințe către dezvoltarea unor sisteme autonome) este evidențiată la nivel european prin Strategia Uniunii Europene privind sistemele de transport inteligente cooperative, o etapă către mobilitatea cooperativă, conectată și automatizată elaborată în 2016.
Autor :Florin Codruț NEMȚANU
Associate Professor, PhD, MEng, BEng, BComm
Universitatea Politehnica București
 Mobilitate
Mobilitate
 Mobilitate
Mobilitate
 Mobilitate
Mobilitate